Форматы файлов данных
Допускается использование программы как расчётного модуля с внешней подготовкой данных и обработкой результатов. Исходные данные должны передаваться в расчётный модуль в заданном формате, который совпадает с форматом файлов хранения созданных конструкций.
4.1 - Формат файлов хранения и передачи исходной информации.
Любая конструкция, рассчитываемая программой, описывается набором текстовых строк, собранных в файл (*.mpo - одиночные конструкции; *.mpor - рамы; *.mpop - профили). Это удобно уже тем, что информация одинаково читается и обрабатывается большинством текстовых редакторов и может быть создана независимо от нашей программы и затем запущена в ней.
Любая рассчитываемая конструкция состоит из одного или более «Участков», например,
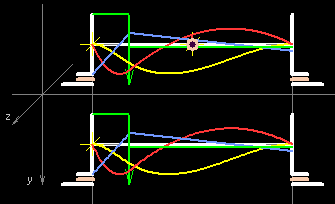
Файл „...\Ознакомительные примеры\Заставка А.mpo“
1 E500;340;100;60;0;0;0;1;0;0;0;0;0;0;0;0;0;0;0;
2 0;0;2;-180;0;0;0;10;7800;2,1e11;1,6e11;0;0;
3 0;J;5,781e-4;3,083e-9;1,534e-7;1,534e-7;0,000;0,000e+0;0,000e+0;0;1;
~&-HxB 100x100;3
~Fr-1-L0;0;0;0;30;5;1
~0;G;0;23;-;-
~1;D;0;0;360;4
~2;S;0;-;-;4
~Fr-end
~** Pr-end **
4 0;6;0;1e99;1e99;1e99;1e99;1e99;1e99;
5 1;1;-1;180;0;0;90;10;7800;2,1e11;1,6e11;0;0;
6 1;z;6;50;0;42;0;0;0;0;0;0;0;0;50;0;44;0;0;0;0;0;0;0;1;
7 2;0;2,2;180;0;0;0;10;7800;2,1e11;1,6e11;0;0;
8 2;z;9;50;0;50;4;0;0;0;0;0;0;1;50;0;40;4;0;0;0;0;0;0;1;
9 3;1;-1;180;0;0;90;10;7800;2,1e11;1,6e11;0;0;
10 3;z;11;45;8;10;4;10;4;10;4;10;4;1;45;8;0;0;0;0;10;4;10;4;1;
11 3;q;90;1;0;0;A;
12 K> Каждая конструкция может иметь комментарий.
13 #0
Разберём его.
Строка 1 E500;340;150;90;0;0;0;1;0;0;0;0;0;0;0;0;0;0;0; (Установки для всей конструкции)
Е – Установочная строка единичной конструкции,
500 – Координата “x“ начальной точки построения (pixel),
340 – Координата “y“ начальной точки построения (pixel),
150 – Масштаб линейных размеров (pixel/m),
90 – Масштаб вывода результатов (pixel/Max),
0 – Частота возбуждения (rad/c),
0 – Конструкция замкнута в кольцо (да=1/нет=0),
0 – W’=Wn / W’=Wn+Wk) (1/0),
1 – Выводить W’ (1/0),
0 – Выводить Vb (1/0),
0 – Выводить Mb (1/0),
0 - Выводить Nn (1/0),
0 – Выводить Wb (1/0),
0 – Выводить Vn (1/0),
0 – Выводить Mn (1/0),
0 - Выводить Nb (1/0),
0 – Выводить Vk (1/0),
0 – Выводить Mk (1/0),
0 – Выводить Wk (1/0),
0 - Выводить Nk (1/0).
(
При записи отдельной конструкции в составе РАМЫ или её копировании в отдельный файл, до его редактирования, установочная строка начинается с „E1“ и имеет три дополнительных поля:
E1;1,0;0,5;77;500;340;150;90;0;0;0;1;0;0;0;0;0;0;0;0;0;0;0;
где: 1,0 – Координата “x“ начальной точки балки в РАМЕ (m),
0,5 - Координата “y“ начальной точки балки в РАМЕ (m),
77 – Угол наклона оси „Ok“ балки к оси „Ox“ РАМЫ (Grad).
)
Строка 2 0;0;2;-180;0;0;0;10;7800;2,1e11;1,6e11;0;0; (Установки для участка 0)
0 – Номер участка,
0 – Прямой / дуга окружности (0/1),
2 – Длина или радиус дуги „R“ (м),
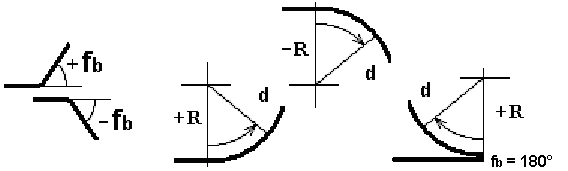
-180 – начальный угол поворота "fb" местной системы координат "Oknb" участка относительно местной системы координат последней точки предшествующего участка, (fb,fn,fk - последовательность поворотов) (Grad),
0 - "fn",
0 - "fk",
0 - Длина дуги „d“ (Grad),
10 - Число делений на равные элементы,
7800 - Плотность материала,
2,1e11 - Модуль продольной упругости Е,
1,6e11 - Модуль сдвига D,
0 - Общий коэффициент внутреннего сопротивления,
0 - Общий коэффициент внешнего сопротивления,
(
В общем случае строка свойств участка может иметь дополнительные поля для задания отдельных сопротивлений при перемещениях элементов по каждой из обобщённых координат. Так, в файле «Заставка B.mpo» эта строка имеет вид:
0;0;2;-180;0;0;0;10;7800;2,1e11;1,6e11;0;0;0,001;0,002;0,003;0,0001;0,0002;0,0003;
Редактирование этих свойств для каждого участка вызывается кнопкой «Демпфирование»
)
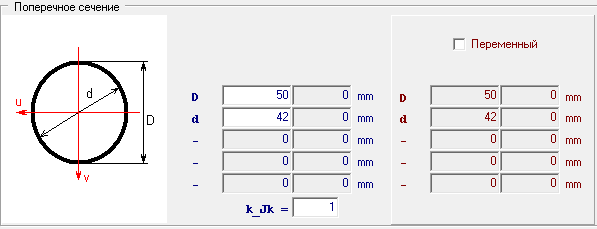
Строка 3 0;J;5,781e-4;3,083e-9;1,534e-7;1,534e-7;0,000;0,000e+0;0,000e+0;0;1; (Профиль)
(
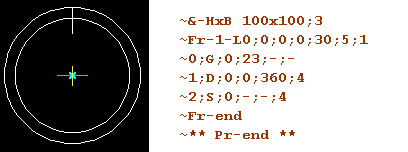
Строки, начинающиеся символом „~ “, являются описанием профиля (Замкнутое круговое кольцо D=50 mm; d=42 mm) созданного внутренним приложением «Редактор» как тонкостенный. Он может в этом приложении редактироваться. Эта дополнительная информация информация не обязательна и при её отсутствии профиль считается заданным вручную.
)
0 – Номер участка,
J – Профиль для призматических участков,
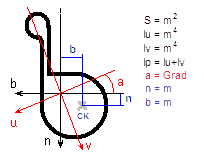
5,781е-4 – Площадь поперечного сечения „S“,
3,083e-9 – Полярный момент инерции площади сечения „Jр“,
1,534е-7 – Осевой момент инерции площади сечения „Ju“,
1,534е-7 – Осевой момент инерции площади сечения „Jv“,
0,000 – Угол между осями „u“ и „b“,
0,000e+0 – Координата „n“ центра кручения сечения,
0,000e+0 – Координата „b“ центра кручения сечения,
0 – Резервное поле,
1 – Поправочный коэффициент для момента инерции
площади сечения при кручении (по умолчанию = 1).
Строка 4 0;6;0;1e99;1e99;1e99;1e99;1e99;1e99; (Опора)
0 – Номер участка,
6 – Код концевой упругой заделки,
0 – Расстояние от начала участка,
1е99 – Жёсткости Ck, Cn, Cb, Uk, Un, Ub,
(
Предусмотрены следующие виды опор (типы 6 и 7 – частные случаи типа 8):
6 – Упругая заделка (только для концевых сечений всей балки. Все жёсткости > 0, иначе - тип 8),
7 - подпорка (Ck;Cn;Cb;0;0;0),
8 - универсальная опора, (Ck;Cn;Cb;Uk;Un;Ub;nk;bk;b_Ck;bn;b_Cn;nb;b_Cb;b_Uk;b_Un;b_Ub),
Смотри файл «Заставка B.mpo». В этом файле строка полностью заполнена и имеет вид:
0;6;0;1e9;1e9;1e9;1e9;1e9;1e7;0,1;0,2;0,0012;0,3;0,003;0,4;0,004;0,005;0,006;0,007;
Для полной ясности откройте указанный файл, вызовите режим редактирования и поместите курсор в любое поле описания опоры. Затем, появившейся кнопкой «Свойства» вызовите для редактирования её дополнительные характеристики.
)
Строка 5 1;1;-1;180;0;0;90;10;7800;2,1e11;1,6e11;0;0; (Участок 1)
1 – Номер участка (Новый участок),
1 – Дуга окружности (0/1),
-1 – Радиус дуги (m),
-180 – начальный угол поворота "fb" местной системы координат "Oknb" участка относительно местной системы координат последней точки участка (Grad),
0 - "fn",
0 - "fk",
90 - Длина дуги (Grad),
Строка 6 1;z;6;50;0;42;0;0;0;0;0;0;0;0;50;0;42;0;0;0;0;0;0;0;1; (Профиль)
(
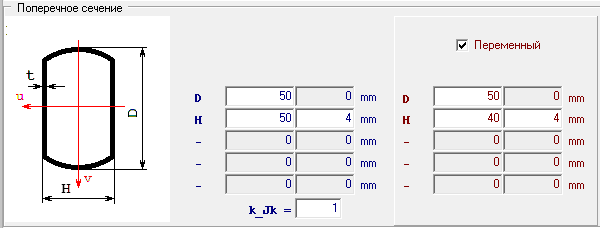
Тип „z“ предназначен для не призматических участков и содержит ограниченный набор рассчитываемых профилей. Первые 10 рассчитываются по стандартным формулам, остальные, (частные случаи двутавра) как собранные из прямоугольных пластин тонкостенные. (См. файл «Профили_Test.xls».
)

)
1 – Номер участка,
z – Профиль Nr.6 из списка сечений допускаемых для не призматических участков:
Строка 7 2;0;2,2;180;0;0;0;10;7800;2,1e11;1,6e11;0;0; (Участок 2)
2 – Номер участка (Новый участок),
0 – Прямой (0/1),
2,2 – Длина участка (m),
180 – начальный угол поворота "fb" местной системы координат "Oknb" участка относительно местной системы координат последней точки участка 1 (Grad),
0 - "fn",
0 - "fk",
Строка 8 2;z;9;50;0;50;4;0;0;0;0;0;0;1;50;0;40;4;0;0;0;0;0;0;1; (Профиль)
Строка 9 3;1;-1;180;0;0;90;10;7800;2,1e11;1,6e11;0;0; (Участок 3)
2 – Номер участка (Новый участок),
1 – Дуга окружности (0/1),
2 – Радиус (m),
180 – начальный угол поворота "fb" местной системы координат "Oknb" участка относительно местной системы координат последней точки участка 1 (Grad),
0 - "fn",
0 - "fk",
90 - Длина дуги (Grad),
Строка 10 3;z;11;45;8;10;4;10;4;10;4;10;4;1;45;8;0;0;0;0;10;4;10;4;1; (Профиль)
Начальное сучение 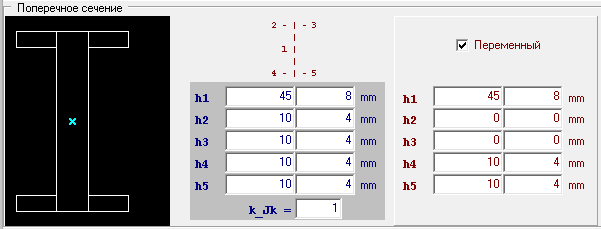
Конечное сечение 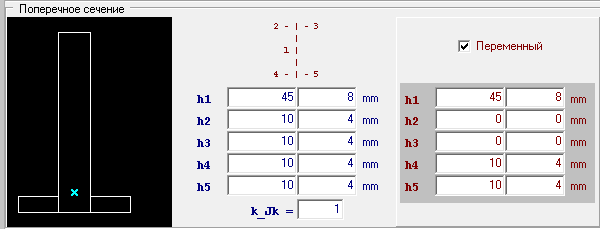
(
Для переключений между концами используйте двойной «клик» мышью по рисунку.
Промежуточные сечения рассчитываются по правилу трапеции
)
Строка 11 3;q;90;1;0;0;A; (Нагрузка)
3 – Номер участка,
q - Тип нагрузки – Сосредоточенная сила
90 - Длина дуги от начала участка (градусы)
1 - Qk
0 - Qn
0 - Qb
А - Активная (А – Динамическая возбуждающая нагрузка; S – Статическая; Для переключения используйте „F2“ при активном поле вода).
(
Предусмотрены следующие виды нагрузок:
q;a;Qk;Qn;Qb;A; - сосредоточенная Сила,
m;a;Mk;Mn;Mb;S; - Момент,
w;a;Wk;Wn;Wb:S; - смещения опоры - Кинематическое возбуждение,
v;a;Vk;Vn;Vb;A; - повороты опоры - Кинематическое возбуждение.
Кроме того, нагрузка распределённая по правилу трапеции:
o;qk1;qn1;qb1;mk1;mn1;mb1;qk2;qn2;qb2;mk2;mn2;mb2;A;
)
Строки 12 K> Каждая конструкция может иметь комментарий.
Строка 13 #0 – Необязательный для одиночных конструкций признак конца записи.
4.2 - Файлы данных «Рам»
Файл „...\Ознакомительные примеры\2 Балки 02..mpor“
R;70;340;150;50;0;0;1;1;1;1;0;0;0;0;0;0;0;0;0;0;
T> "Рама" тоже может иметь комментарий.
#
E1;1,5;-0,5;0;300;340;200;70;0;0;0;1;1;1;1;0;0;0;0;0;0;0;0;
0;0;1;0;0;0;0;100;7800;2,1e11;1,6e11;0;0;
0;J;6e-3;9,000e-8;4,5e-8;4,5e-8;0;0;0;0;0;0;1;
0;6;0;1e99;1e99;1e99;1e99;1e99;1e99;
0;q;0,375;0;999;0;A;
*1;0~1: "x= 2,50 y= -0,5";0;L=1,0;F=0;1;L=0;F=0;0;0;0;0;0;0;0;0;0;0;0;0;
#
E1;2,5;-0,5;0;500;340;200;90;0;0;0;1;1;1;1;0;0;0;0;0;0;0;0;
0;0;1;0;0;0;0;100;7800;2,1e11;1,6e11;0;0;
0;J;6e-3;9,000e-8;4,5e-8;4,5e-8;0;0;0;0;0;0;1;
0;6;1;1e99;1e99;1e99;1e99;1e99;1e99;
#
E1;1,5;0,5;0;250;340;200;50;0;0;0;1;1;1;1;0;0;0;0;0;0;0;0;0;0;
0;0;2;0;0;0;0;166;7800;2,1e11;1,6e11;0;0;
0;J;6e-3;9,00e-8;4,5e-8;4,5e-8;0;0;0;0;1;
0;6;0;1e16;1e8;1e8;1e8;1e8;1e8;
0;6;2,000;1e16;1e8;1e8;1e8;1e8;1e8;
0;q;0,37;0;999;0;A;
#0
Установочная запись «Рамы» практически идентична записи для одиночной балки.
Строка 1 R;70;340;150;50;0;0;1;1;1;1;0;0;0;0;0;0;0;0;0;0;
R – Установочная строка Рамы,
70 – Отстояние системы координат рамы от левого края рисунка (pixel),
340 – Отстояние системы координат рамы от верхнего края рисунка (pixel),
150 – Масштаб линейных размеров (pixel/m),
50 – Масштаб вывода результатов (pixel/Max),
0 – Частота возбуждения (rad/c),
1;1;1;1;0;0;0;0;0;0;0;0;0;0; – Список вывода результатов,
Строка 2 T> "Рама" тоже может иметь комментарий.
Строка 3 # – Разделитель записей,
строки 4 - 8
E1;1,5;-0,5;0;300;340;200;70;0;0;0;1;1;1;1;0;0;0;0;0;0;0;0;
0;0;1;0;0;0;0;100;7800;2,1e11;1,6e11;0;0;
0;J;6e-3;9,000e-8;4,5e-8;4,5e-8;0;0;0;0;0;0;1;
0;6;0;1e99;1e99;1e99;1e99;1e99;1e99;
0;q;0,375;0;999;0;A;
Как уже отмечалось, записи одиночной балки и балки в составе рамы эквивалентны за исключением первых 4х полей (E1;1,5;-0,5;0;300;340;200;70;... и E300;340;200;70;...)
Строка 9 — Описание «Шарнира»
*1; 0~1: "x= 2,50 y= -0,5"; 0;L=1;F=0; 1;L=0;F=0;0;0;0;0;0;0;0;0;0;0;0;0,000e+00;
*1; - Общий Идентификатор шарнира,
0~1: "x= 2,50 y= -0,5"; - Строка описания соединения. Это устаревший формат и может быть заменён на, например, на пустой символ (с сохранением кавычек *1;“ “;...);
0;L=1;F=0; - Балка „0“; Расстояние от начала балки до GL L=1 м ; дуга окружности F=0° (обе балки - прямые),
1;L=0;F=0; - Балка „1“;Расстояние от начала балки до GL L=0 м; F=0 ,
0;0;0;0;0;0; - Податливости GL для балки „0“ (Wk; Wn; Wb; Vk; Vn; Vb;),
0;0;0;0;0;0,000e+00; - Податливости GL для балки „1“ (Wk; Wn; Wb; Vk; Vn; Vb;). При автоматической записи в файл используется формат чисел с фиксированной запятой (последнее число).
Необходимо отметить:
а - «Шарнир» задаётся только для той ПКУК, что выше в списке ;
б - Параметр “F“ не используется .
Надеюсь, что остальные строки в отдельном комментарии не нуждаются.
4.3 - Дополнительные возможности
Возможно в приведённых примерах уже присутствуют два элемента, которые могут быть заданы для любого участка:
Амортизированная масса, её жёсткости и координаты точки крепления
1;A;a;Mk;Mn;Mb;Ck;Cn;Cb;nk;bk;b_Mk;b_Ck;bn;b_Mn;b_Cn;nb;b_Mb;b_Cb;
Жестко прикрепленная масса, её моменты инерции и координаты точки крепления
1;H;a;Mk;Mn;Mb;Jk;Jn;Jb;nk;bk;b_Mk;b_Jk;bn;b_Mn;b_Jn;nb;b_Mb;b_Jb;
где:
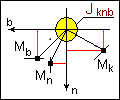
M* - Масса для соответствующей оси местной системы координат,
J* - Массовый момент инерции прикрепленной массы для соответствующей оси,
C* - жёсткости опоры амортизированной массы по осям местной системы координат, nk,bk,bn,nb - отстояние точки крепления массы от упругой линии балки,
b_С* - коэффициенты демпфирования для линейных опор.
Файл „...\Ознакомительные примеры\Присоединёеные массы.mpo“ :
E250;340;200;90;100;0;0;1;0;1;1;0;0;0;0;0;0;0;0;
0;0;1,5;0;0;0;0;80;7800;2,1e11;1,6e11;0;0;
0;J;1e-3;0;2e-7;2e-7;0;
0;8;0;1e9;1e9;1e9;1e9;1e9;1e9;
0;A;1,0;0;10;0;0;1e5;0;0;0;0;0;0;0;0,0001;0;0;0;
0;q;1,5;0;1;0;A;
0;H;0,5;0;10;0;0;0;0;0;0;0;0;0;0;0;0;0;0;
0;H;0,8;0;10;0;0;0;0;0;0;0;0;0;0;0;0;0;0;
0;A;1,3;0;10;0;0;1e5;0;0;0;0;0;0;0;0;0;0;0;
K> Пример введения в конструкцию сосредоточенных и амортизированных масс. Амортизированных масс 2. Вторая останавливает точку крепления на частоте - 100. 100 - собственная частота амортизаторов, но первый имеет высокое демпфирование.
K> Если демпфирование обоих отсутствует, они срабатывают одновременно на частоте 100. ( B_002.mpo ) Разница результатов является, видимо, следствием того, что из-за высокого трения амортизатор 1 перестаёт работать как амортизатор, а
K> работает как жестко прикрепленная масса ( попробуйте уменьшить трение и посмотрите ). Используйте F9.
4.4 - За прошедшие несколько месяцев программа приобрела новые функции, а именно:
1 - Расчёт вращающихся относительно своей продольной оси валов с учётом осевой статической нагрузки. Скорость вращения и продольная сила задаются отдельно для каждого участка вала. В приводимом ниже примере „...\Ознакомительные примеры\Вал+Винт.mpo“ в строке свойств участка добавлены четыре поля «-999;6;9,9;0,3;», что соответствует скорости вращения участка w = 6 Rad/sec; T st = -999 N. При чтении ранее созданных файлов программа автоматически добавит поля «0;0;0;0;» не влияющие на результаты расчёта. Однако, при чтении нового формата прежними вариантами „Программы“ результат «чтения» данных может вызвать ошибку. Первые два поля доступны всем пользователям.
2 – Вторые два поля - учёт возможного присутствия «внутри Участка» наполнителя плотностью 9,9 кг/м³ дополняющего его инерционные свойства при поперечных смещениях с коэффициентом 1, а при угловых - с коэффициентом 0,3. Массы и массовые моменты инерции вычисляются в соответствии с площадью поперечного сечения конструкции. Эти два поля доступны только при использовании программы как вычислительного модуля.
3 - Учёт вращения отдельной жестко прикрепляемой массы относительно продольной оси «Участка» со скоростью w = 66 Rad/sec и эксцентриситетом 0,1 мм. Эти данные записываются в конец строки её описания.
E300;300;200;90;456;0;0;1;0;0;0;1;0;0;0;0;0;0;0;0;0;
0;0;1,2;0;0;0;0;60;7800;2,1e11;1,6e11;0;0;-999;6;9,9;0,3;
0;z;6;120;0;100;0;0;0,0;0;0;0;0;0;120;0;100;0;0;0;0;0;0;0;1;
0;H;1,15;30;30;30;20;10,0;10,0;0;0;0;0;0;0;0;0;0;0;66;0,1;
0;q;1,15;0;1;1~90;A;
0;m;1,15;0;0;0;A;
0;8;0,15;1e9;1e9;1e9;0;0;0;0;0;0;0;0;0;
0;8;0,95;0;1e9;1e9;0;0;0;0;0;0;0;0;0;
#0
4 - Возможно, более полное представление даст просмотр файла „...\Ознакомительные примеры\Соосные Валы K+v1+v2.mpor“ – пример расчёта колебаний корпуса с двумя соосными винтами вращающимися в разных направлениях. Первая строка – установочная строка «Рамы» имеет два новых опциональных (не обязательных) поля:
R;50;340;100;90;99;0;1;0;0;1;1;0;0;0;0;0;0;0;0;0;V;Z;X;
Присутствие этих знаков в файле данных включает новые переключатели на главной панели управления программы:
p - Возбуждение от эксцентриситета вращающихся масс (w = f); Другие нагрузки игнорируются. („V“)
p - Считать продольную статическую силу пропорциональной квадрату скорости вращения. („X“)
p - При расчёте связанных "GL" конструкций уточнять решение методом итераций. („Z“)
И, если назначение первого только «Удобство» при задании возбуждающей нагрузки, то второй позволяет при расчёте вращающихся гребных винтов рассчитывать «Упор» передаваемый валом исходя из значений «Упора (Tst(0)) при заданной скорости вращения (W(0))» и действующей частоты вращения вала (винта) W по формуле
Tst = а*W², где а = Tst(0)/W(0)² .
В качестве установочных берутся значения „Tst(0) = -999“ и „W(0) = 6“ записанные в строке данных «участка»; при выключенном переключателе отмеченные величины имеют прежнее значение. Влияние внесённых дополнений можно увидеть на примере расчёта гребного вала на пяти опорах
(
„...\Ознакомительные примеры\Винт - Пр. Масса 40 1~0 1~90.mpo“
E100;340;60;90;42;0;0;1;1;1;1;1;1;1;1;0;0;0;1;0;0;V;X;
0;0;0,75;0;0;0;0;7;7800;2,1e11;1,6e11;0;0;-5e6;40;
-
** Для одиночной конструкции наличие включённых переключателей записывается в конце установочной строки.
)
(Переключатель „X = Да“ Резонанс на частотах 41-43; „ X = Нет“ - на частотах 53-55 Рад/сек).
Назначение третьего – переключение метода решения системы уравнений совместности деформаций в узлах „GL“ рамы. Смотри Приложение „00“
5 - Учёт влияния жидкости, текущей по трубопроводу переменного сечения. В примере„...\Ознакомительные примеры\ Кориолис 3 уч.mpo“ рассчитывается прямая балка из 3-х участков. Для редактирования потоков используется кнопка “Труба“ в окне редактирования свойств конструкции.
E300;300;100;90;207;0;0;1;0;0;1;0;0;0;0;0;0;0;0;1;1;
0;0;1;0;0;0;0;33;7800;2,1e11;1,6e11;0;0;
0;z;6;200;0;190;0;0;0;0;0;0;0;0;200;0;190;0;0;0;0;0;0;0;1;
0;8;0;1e9;1e9;1e9;0;0;0;
0;u;1000;10;0,0284;0,0284;0;0;
1;0;1;0;0;0;0;33;7800;2,1e11;1,6e11;0;0;
1;z;6;200;0;190;0;0;0;0;0;0;0;0;200;0;190;0;0;0;0;0;0;0;1;
1;q;0,5;0;1;0;A;
1;u;1000;10;0,0284;0,0284;0;0;
2;0;1;0;0;0;0;33;7800;2,1e11;1,6e11;0;0;
2;z;6;200;0;190;0;0;0;0;0;0;0;0;200;0;190;0;0;0;0;0;0;0;1;
2;7;1;0;1e9;1e9;0;0;0;
2;u;1000;10;0,0284;0,0284;0;0;
#0
E300;300;100;90;207;0;0;1;0;0;1;0;0;0;0;0;0;0;0;1;1;
В эту строку добавлены два поля для вывода сил инерции Кориолиса Kn и Kb
2;u;1000;10;0,0284;0,0284;0;0;
2 — Участок 2,
1000 — Плотность жидкости (kg/m³),
10 - Скорость во входном (начало участка) сечении (m/sec),
0,0284 - Площадь входного сечения (m²),
0,0284 - Площадь выходного (конец участка) сечения (m²).
При учёте движущейся внутри балки жидкости на данный момент считается, что канал протекания является осесимметричным, а его ось совпадает с осью балки вне зависимости от реальной формы её сечения. Инерция поворотов сечений потока жидкости внутри «трубы» вместе с сечением балки учитывается с коэффициентом k_F <= 1 (по умолчанию k_F = 0). Входное и выходное сечения «трубы» соответствуют началу и концу участков; текущее значение вычисляется по правилу трапеции. Скорость жидкости задаётся для входного сечения (начало участка) вне зависимости от знака и рассчитывается для каждого текущего сечения в соответствии с постоянством расхода. Каждый участок балки может иметь несколько независимых «трубопроводов». В результатах дополнительно выводится распределённая по длине каждого участка сила инерции Кориолиса.
Отсутствие добавленных позиций в файле данных не сказывается на работе программы.
Created with the Personal Edition of HelpNDoc: Free Qt Help documentation generator