ПКУК
- Пространственно-Криволинейная Упругая Конструкция
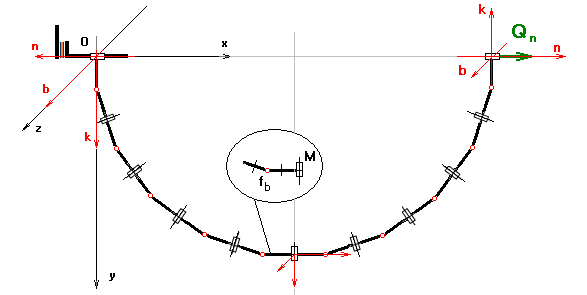
Назовём такой любую упругую конструкцию, размер которой вдоль некоторой оси, искривлённой в пространстве, значительно больше поперечных размеров любого сечения, нормального к этой оси. Её концевые сечения всегда связаны с опорой, называемой «Упругая заделка». Эта "фиктивная" опора никогда не рисуется, а её податливости назначаются и могут быть очень большими, но конечными (определяют свободный конец). В программе значения этих податливостей приняты равными 333 единицам соответствующего измерения. Величина условная и взята из опыта расчётов; её уменьшение на два порядка или увеличение на 5 порядков не приводят к сколько-нибудь заметному изменению результатов расчёта. Единственное условие - Назначаемые Начальные Податливости свободных концов должны быть одинаковы для обеих Парциальных Систем. Если концевые сечения ПКУК имеют реальную опору в качестве которой может выступать любой объект (например, при расчёте колебаний это может быть сосредоточенная масса), то в качестве начальных значений будут взяты его податливости как опоры.
(
К Вопросу о том, что считать «нулём» и «бесконечностью».
При решении дифференциальных уравнений мы постоянно сталкиваемся с необходимостью определить некие постоянные (решение краевой задачи). В нашем решении также присутствует неопределённость; что произойдёт с безинерционным незакреплённым элементом при действии на него единичной нагрузки - улетит в бесконечность. Мы ограничили эту "бесконечность" величиной на много порядков большей максимально достижимых деформаций исследуемого объекта, но не приводящей к потере значащих цифр при вычислениях. Алгоритм МПО построен так, что приращения ПО важнее их конкретных величин.
Коснёмся, слегка, точности вычислений. Условимся под термином «Математическая модель» понимать некий оператор, преобразующий исходные данные в результаты моделирования, а сами результаты рассматривать как результаты эксперимента, полученные с помощью этой своеобразной измерительной аппаратуры. При этом все решения отличающиеся друг от друга на величины не превышающие погрешности реальных измерительных приборов будем считать равнодостоверными (мы не можем отличить виртуальный эксперимент от реального). С точки зрения потребителя важны достоверность и цена результатов эксперимента, в том числе и виртуального. Математические модели, для которых результаты моделирования при одинаковых исходных данных неотличимы по достоверности – эквивалентны и наилучшей из эквивалентных по достоверности моделей будем считать наиболее экономически эффективную.
Желающим полнее познакомиться с затронутым вопросом можно рекомендовать статью „С.И. ГУР-МИЛЬНЕР, М.У. ИСМАГАМБЕТОВ. «Оценки достоверности математических моделей упругих тел и их применение в численных расчетах». Астана 2005“.
)
В точке соединения податливости соединяемых Парциальных Систем определяются матрицей, соответствующей шести обобщённым координатам местной системы координат Oknb -
перемещениям „Wk“, „Wn“, „Wb“ и углам поворота относительно этих осей „Vk“, „Vn“, „Vb“ (матрица парциальных откликов «ПО») и вектором соответствующих перемещений от внешней нагрузки, действующей на ПС (вектор парциальных параметров «ПП»).
Qk= 1 Qn= 1 Qb= 1 Mk= 1 Mn= 1 Mb= 1 Нагрузка на ПС
Akk Akn Akb Ckk Ckn Ckb Wk
Ank Ann Anb Cnk Cnn Cnb Wn
Abk Abn Abb Cbk Cbn Cbb Wb
Bkk Bkn Bkb Dkk Dkn Dkb Vk
Bnk Bnn Bnb Dnk Dnn Dnb Vn
Bbk Bbn Bbb Dbk Dbn Dbb Vb
Здесь A и B – перемещения и повороты от единичных сил, C и D – перемещения и повороты от единичных моментов, W и V – перемещения и повороты от внешней нагрузки на парциальную систему.
Конструкция может быть замкнута в кольцо и иметь упругие шарнирные соединения с другими конструкциями и/или быть трубопроводом с протекающей по нему жидкостью.
Все величины (ПО, ПП, Массы, Жёсткости, Нагрузка, Деформации и т.п.) являются комплексными, что позволяет учитывать внешнее и внутреннее линейное демпфирование и иные эффекты связанные с определением реакций упругой системы на её деформации, их скорости и ускорения в установившемся сложном движении и временной фазой внешнего воздействия.
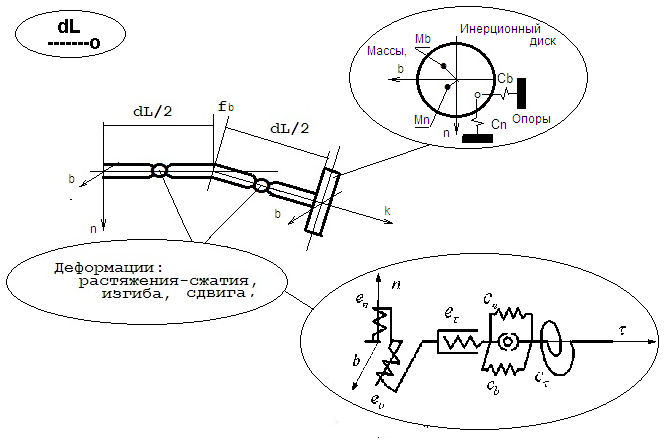
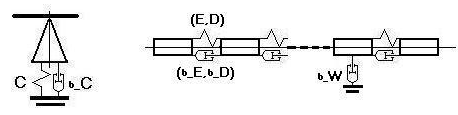
1. Основным элементом конструкции выступает «Участок». Конструкция может состоять из одного или более «участков», соединенных последовательно. Участки, в свою очередь, разбиваются программой на «Базовые Элементы». Инерционные характеристики участка и геометрические характеристики его поперечных сечений либо постоянны либо, при некоторых ограничениях, рассчитываются по «правилу трапеции». Каждый «участок» может иметь необходимое число упругих опор и точек прикрепления сосредоточенных присоединённых и/или амортизированных масс и моментов инерции, причём, в каждой точке прикреплённых конструкций может быть несколько. Участок может лежать на упругом основании, быть прямым или изогнутым по дуге окружности, присоединяться к предшествующим участкам под заданным углом, состоять из любого (> 0) числа «Базовых» элементов. В простейшем случае это - цепь из заданного числа „n“ точечных масс, соединённых упругими стержнями длиной „dL“.

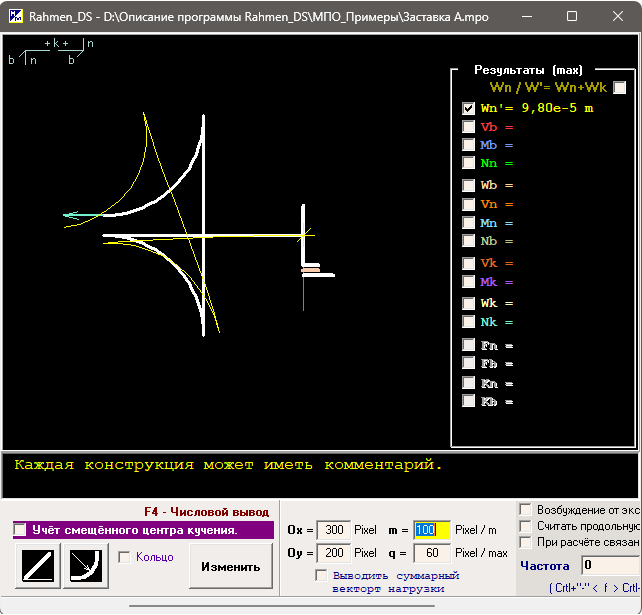
В общем случае "Окно" для расчёта одиночной конструкции имеет вид:
2. Базовый элемент - это коробочка с отделениями для "подэлементов - деталей". Отделения могут быть заполнены или пусты, но место для данных, порядок их следования и способ подключения зарезервированы. (В принципе, присоединяемым «подэлементом» может быть любой объект, для которого мы можем подсчитать приращения ПО и ПП после его присоединения к парциальной системе. При этом задание свойств такого объекта и метод расчёта приращений ПО и ПП должны быть однозначно определены. Например, учёт вращения элемента относительно своей продольной оси). Упрощённо его можно представить так
Выбор геометрии базового элемента связан с удобством аппроксимации участков, изогнутых по дуге окружности. Для аппроксимации не круговых дуг придётся использовать последовательность участков, задаваемую вручную или внешней программой. Принятая геометрия (углы кривизны – внутреннее свойство элемента) позволяет избежать отдельного согласования осей координат в точке ввода опор, нагрузки и других характеристик участков, обладающих пространственной кривизной.
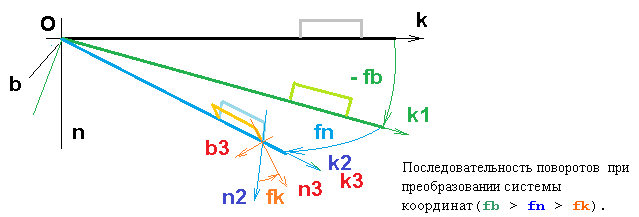
Пространственная криволинейность достигается с помощью трёх последовательных поворотов осей местной системы координат (конструкции в целом, отдельных участков и элементов на углы fb, fn, fk.
В настоящее время, из-за отсутствия подходящего графического редактора, пользователю прямо доступен только угол fb (плоские конструкции). Однако, сама программа использует все три угла, например, при расчёте колебаний относительно статически деформированной оси балки или при расчёте деформаций участков с переменным профилем, главные центральные оси инерции которого не совпадают с плоскостью чертежа. Кроме того, при вызове программы как расчётного модуля для отдельно подготовленного файла описания конструкции могут использоваться все три поворота и, следовательно, рассчитываться изначально пространственные конструкции.
Характеристики поперечного сечения каждого участка могут быть заданы либо вручную (участок - призматический)
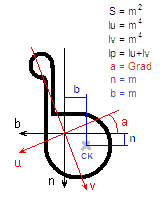
S – Площадь сечения (m^2);
Iu и Iv – Главные центральные моменты инерции площади сечения (m^4);
Ip – Полярный момент инерции площади сечения (m^4);
a – Угол наклона главных центральных осей инерции профиля к оси Ob (градусы);
n_CK – Координата „n“ центра кручения (m);
b_CK – Координата „b“ центра кручения (m);
либо с помощью встроенной программы редактирования. В этом случае нужный профиль можно выбрать из предлагаемого списка или создать новый, используя „Редактор“. Выбранные из списка профили позволяют сделать участок не призматическим (любой из задаваемых размеров может меняться по правилу трапеции).
Оригинальные профили, созданные в „Редакторе“, будут внесены в файл данных для каждого отдельного участка одиночной конструкции и, следовательно, могут редактироваться.
Следует обратить внимание на наличие для каждого профиля поправочного коэффициента „k_Jk“. Известно, что жёсткость профиля сечения при кручении зависит от многих параметров, задать которые универсальной формулой или таблицей возможно разве что для круга и вписанных в него правильных многоугольников. По умолчанию величина коэффициента равна 1. Другие значения пользователь должен назначать сам на основании собственного опыта.
В отличие от массивных сечений момент инерции тонкостенных профилей при кручении вычисляется по иным правилам.
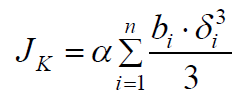 где bi и δ i - длина и толщина пластин, из которых собирается профиль.
где bi и δ i - длина и толщина пластин, из которых собирается профиль.
Материал каждого участка конструкции предполагается линейно-упругим, но с введением в него неупругих сопротивлений через комплексность инерционно-жесткостных характеристик; как внутренние, так и внешние сопротивления вызывают появление у соответствующих величин мнимой части.
Ввиду малости деформаций и перемещений при вибрации (резонансные режимы – отдельный случай) задача решается в геометрически линейной постановке. В качестве основной кинематической гипотезы, позволяющей свести задачу теории упругости к задаче строительной механики, принята гипотеза плоских сечений с поправкой на сдвиг.
Внешняя динамическая нагрузка на рассматриваемую линейную модель предполагается периодической. Она может быть представлена гармоническим рядом. Действие каждой гармоники следует рассмотреть отдельно, а общее решение получить суперпозицией частных. Такой подход вызван тем, например, что величины присоединенных масс жидкости зависят от формы вынужденных колебаний рассчитываемой конструкции, которая, в свою очередь, изменяется с изменением частоты возбуждения. Приложенная внешняя нагрузка в виде сосредоточенных или распределённых сил и моментов автоматически приводится к центрам инерционных дисков элементов. Допускается задавать отдельную статическую нагрузку и рассчитывать колебания относительно статически деформированной оси конструкции. В частном случае, когда частота колебаний равна нулю, имеет место расчет статического деформирования квазиодномерной модели.
В качестве математического метода выбран метод парциальных откликов (МПО) в его дискретном варианте. При использовании этого метода параметры установившихся колебаний (внутренние усилия и смещения) вычисляются из условий совместности деформаций правой и левой парциальных систем в точке их сопряжения. Выбранный подход позволил избежать традиционного решения краевой задачи, представляющей собой, на взгляд авторов, существенно более сложный и трудоемкий процесс, чем совместное решение двух задач с начальными условиями. Выбор в качестве парциальных откликов (ПО) смещений и поворотов от единичных усилий соответствует причинно-следственным связям в задачах строительной механики, что гарантирует, при соответствующем построении алгоритма расчета, соответствие между устойчивостью результатов вычислений и устойчивостью моделируемого процесса.
3. Хотелось бы коснуться процесса расширения (модернизации) расчётной модели. Обычно сначала строится максимально близкая к рассматриваемому устройству модель, которая затем упрощается под возможности расчёта. При удаче, модель применяется для иных, сходных конструкций. Мы выбрали обратный путь; построили простейшую хорошо работающую со стандартными задачами модель и дополняем её свойства (путем модернизации Базового элемента) для решения более сложных задач.
Следует не забывать, что отдельный элемент участка нельзя ввести частично или добавить к нему извне новое свойство. Иными словами, расширение возможностей используемой модели осуществляется добавлением новой «детали» в ряд других составляющих «базового элемента». Сама модель, состоящая из участков, не меняется.
При введении нового свойства главное ограничение – нововведение не должно расширять матрицу «парциальных откликов» внося в неё новые позиции (элементы матрицы) или менять смысл существующих. Подобные расширения, по сути, являются созданием нового метода и должны распространяться на всю конструкцию и быть соответственно обоснованы).
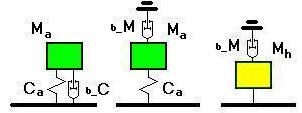
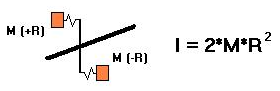
4. В настоящее время при прямом вызове программы пользователь самостоятельно собирает каждую отдельную ПКУК из участков; разбивка модели на базовые (конечные) элементы; выполняется программой. При выполнении этой работы необходимо учитывать, что, иногда требуется творческий подход. Например, использование амортизированных моментов инерции в программе не предусмотрено и для их моделирования следует использовать массы смещённые относительно оси вращения. Так, при крутильных колебаниях вводятся две (можно больше) отдельные равные точечные амортизированные массы со смещением +/- R , то есть так, как это обычно реализуется на практике.
На наш взгляд, наиболее рациональный подход при использовании некоторых конструктивных решений - переход к использованию программы как расчётного модуля с внешней подготовкой исходных данных и внешним графическим представлением результатов.
Created with the Personal Edition of HelpNDoc: Effortlessly upgrade your WinHelp HLP help files to CHM with HelpNDoc