Рамы
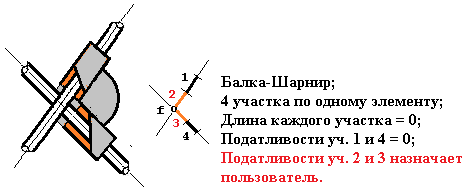
Несколько иначе реализован подход, позволяющий собирать конструкцию из нескольких конструктивных модулей (парциальных конструкций) - «Раму». Мы не предполагаем большого количества соединяемых конструкций и под «Рамой» подразумеваем набор одновременно рассчитываемых одиночных конструкций «балок» как связанных между собой шарнирами в собственно «Раму», так и независимых. В последнем случае очень удобно сравнивать конкурирующие варианты. Сборка осуществляется посредством введения обобщенных шарниров с задаваемыми линейными и угловыми податливостями по трем ортогональным направлениям. Каждый шарнир «GL» – безразмерная балочка из 4х элементов (правильнее, четырёх участков по одному элементу). Крайние элементы жёстко соединены со связываемыми конструкциями и нужны для согласования осей в точке сопряжения, а средние - для задания податливостей шарнира отдельно (если надо) для каждой из связываемых балок. В точке соединения этих элементов осуществляется поворот между осями балок 1 и 2.
Элементы, из которых собраны «Шарниры», названы нами «служебными». В принципе, это нормальные «базовые элементы» (или „Участки“ из одного элемента), но ряд полей для свойств элемента пусты или трактуются иначе (вместо жесткостей – податливости, вместо длины – признак служебного элемента «-1»), а иные содержат информацию (например, о пересекаемой балке), отсутствующую у стандартного элемента. Они выполняют связующую роль „Посредника“. А так же используются при замыкании отдельной конструкции в «Кольцо», при поворотах между «Участками» (Поворот, включённый в базовый элемент, не удобен для соединения „Участков“, поскольку осуществляется в середине его стержня длиной „dL“), как элементы связи с другими конструкциями, как точки подключения прикрепляемых масс и т.п. Использование «Служебных» элементов автоматизировано.
Отдельная конструкция не может иметь «шарнирных» связей сама с собой (кроме замкнутой в кольцо). На число связей с другими конструкциями программных ограничений не имеет и, например, балки, осевые линии которых частично совпадают, могут быть связаны несколькими шарнирами

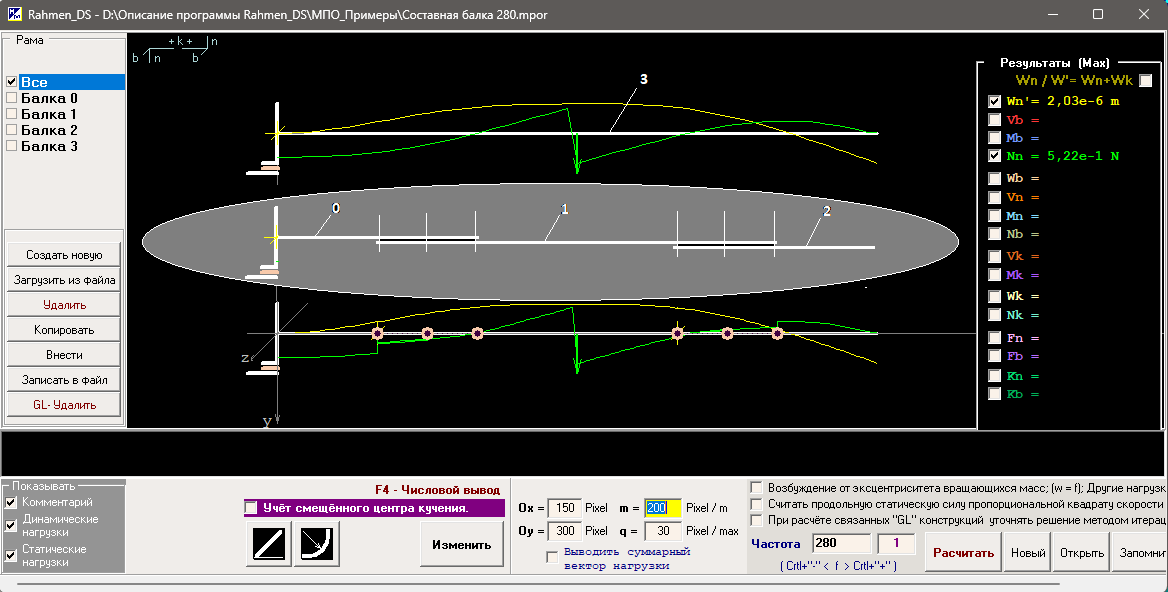
Пример расчёта: - „...\Ознакомительные примеры\Составная балка 280.mpor“.
Алгоритм расчёта связанных балок основан на вычислении коэффициентов взаимовлияния (смещений от приложения единичных нагрузок в точках установки шарниров) и последующего решения системы уравнений, отражающей совместность деформаций в точках их установки. Благодаря используемому методу, если число точек сопряжения конструктивных модулей сравнительно не велико, вычислительный процесс даже на «весьма древних» персональных компьютерах выполняется достаточно быстро (См. приложение „00“).
Следует избегать соединения нескольких конструкций в одной «Точке».
Это, помимо того, что трудно осуществимо на практике, приводит к не устойчивой работе программы при определении точек контакта и, пусть не всегда ("...\3 балки 2 GL.mpor"),
но может привести к недостоверному счёту. Работа с "Шарнирами" нуждается в совершенствовании как с точки зрения автоматизации и контроля моделирования реальных конструкций так и в плане решения результирующей системы линейных алгебраических уравнений.
Мы не ставили себе целью расчёт многосвязных конструкций, обосновано допуская, что даже при ограниченном числе связей можем встретить определённые трудности. Например, при расчёте вибрации вращающихся соосных валов, решение системы алгебраических уравнений совместных деформаций требует более сложного, чем „Метод Гауса“, подхода. Нами указан и частично успешно реализован путь решения проблемы. Полное её решение требует дополнительных исследований.
В примере „...\Ознакомительные примеры\Соосные Валы v1+v2.mpor“ соосные валы рассматриваются как отдельно, так и как связанные конструкции, как с вращением винтов, так и без.
В примере „ ...\Ознакомительные примеры\Соосные Валы K+v1+v2.mpor“ валы установлены на некий «Корпус». При смене метода решения (Переключатель на панели управления) необходимость и возможность такого выбора проявляются заметно нагляднее.
Основное окно программы при работе с "Рамой" имеет вид
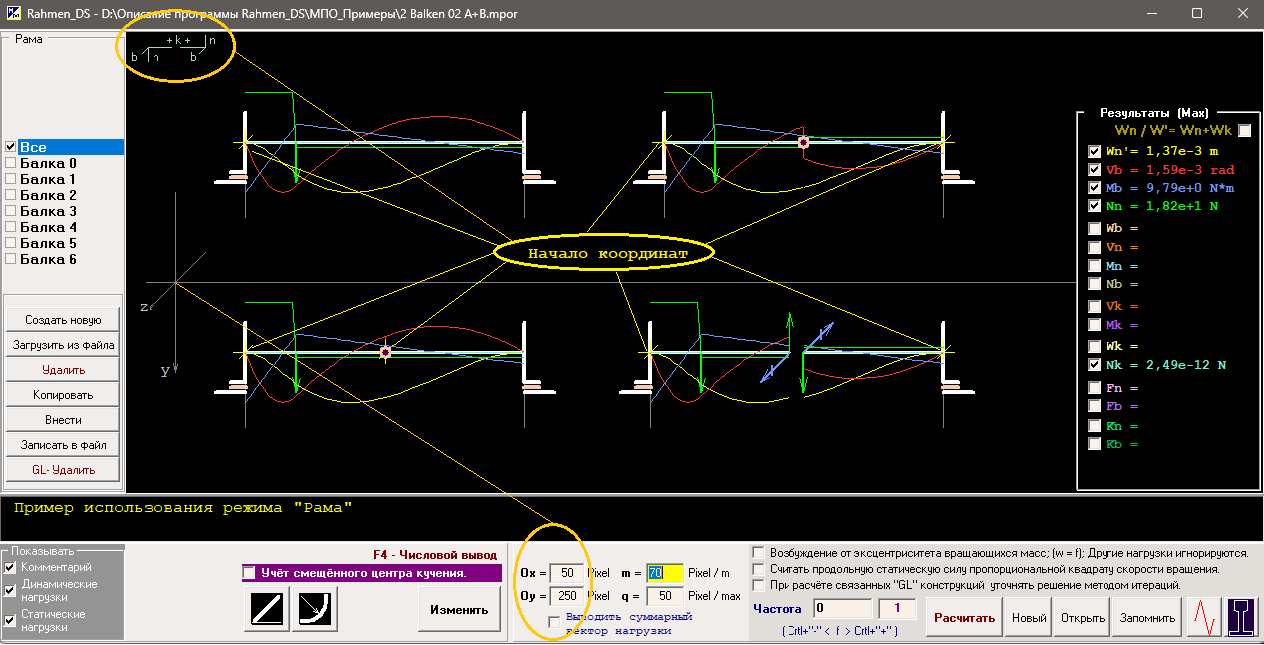
Начало каждой балки отмечено местной системой координат. Для вызова режима редактирования отдельной "Балки" надо "выбрать" её в списке и нажать кнопку "Изменить". Для просмотра результатов её расчёта используйте кнопку ""F4". Для запоминания результатов расчёта всей "Рамы" используйте кнопку "F11".
Внимание
Будьте внимательны. Наша программа всегда решает трёхмерную задачу и исходные данные должны ей соответствовать. Неполные данные могут привести к ошибкам.
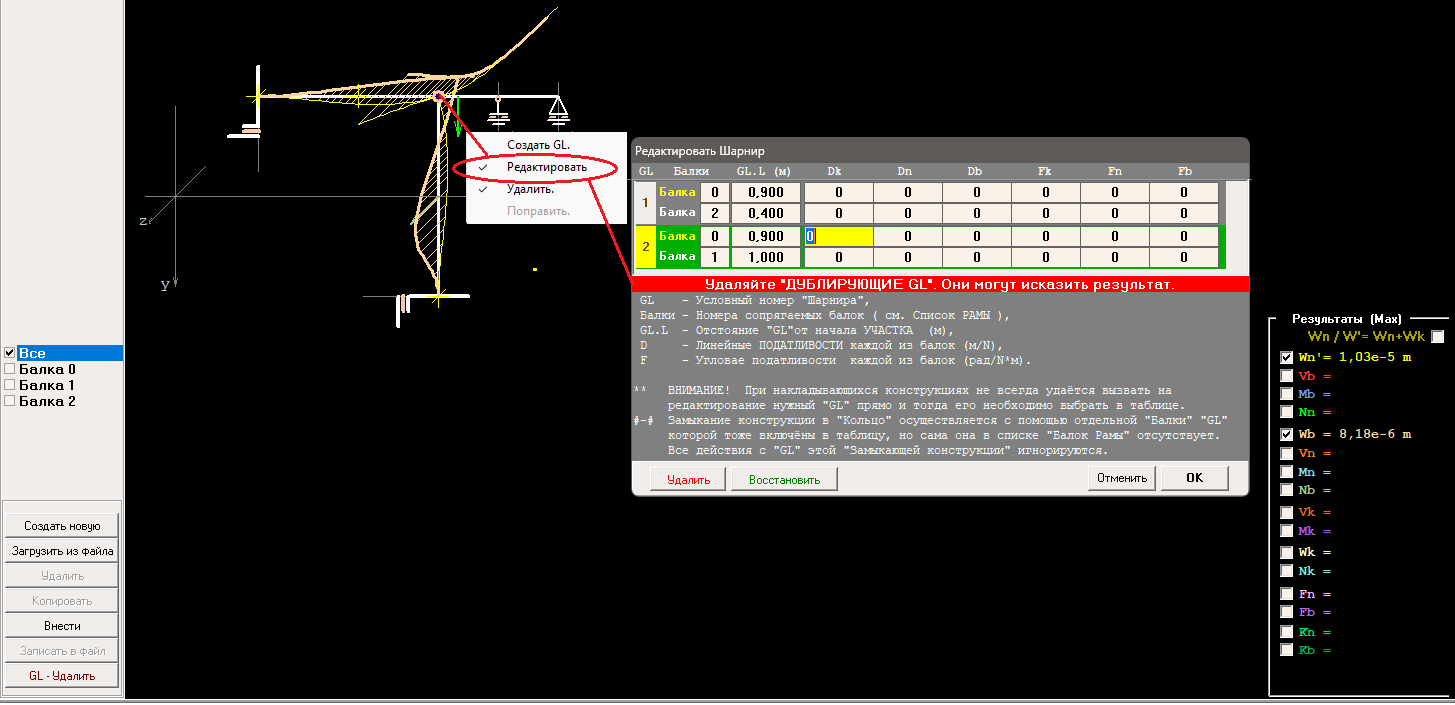
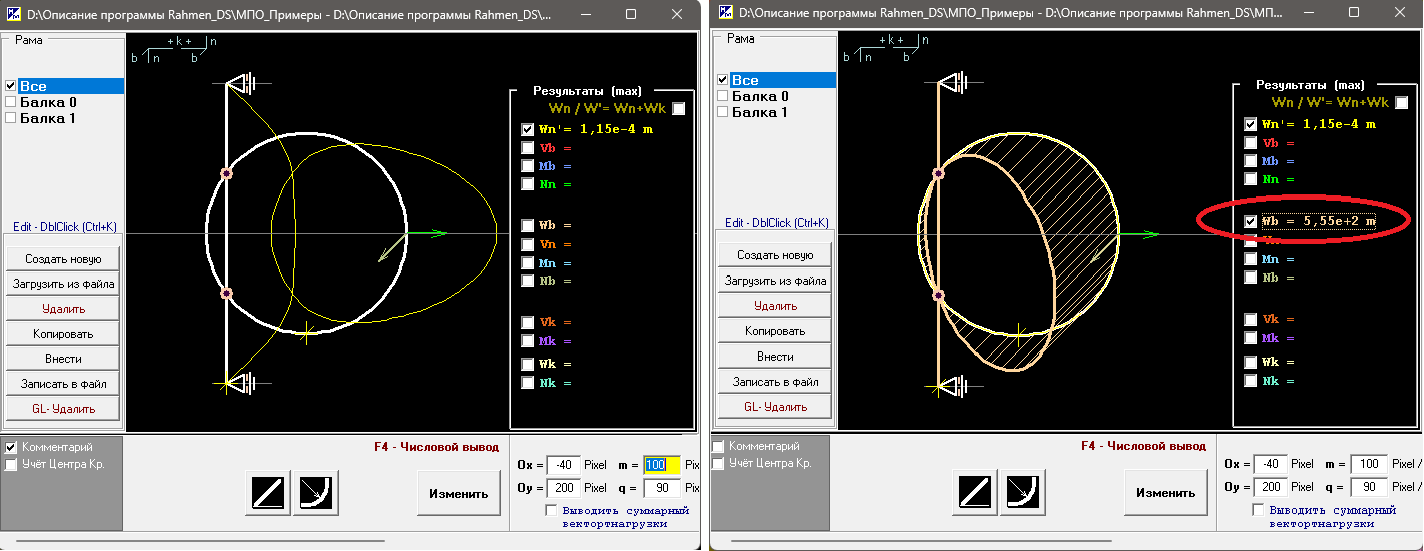
Вызовите файл „...\Ознакомительные примеры\Балка и кольцо.mpor" . Я не думаю, что полученное решение вызовет какое-либо возражение. Но, если посмотреть решение выходящее из плоскости рисунка (следующий рисунок), то выведенное смещение Wb вызывает вопрос: - "Всё ли в порядке с программой ?".
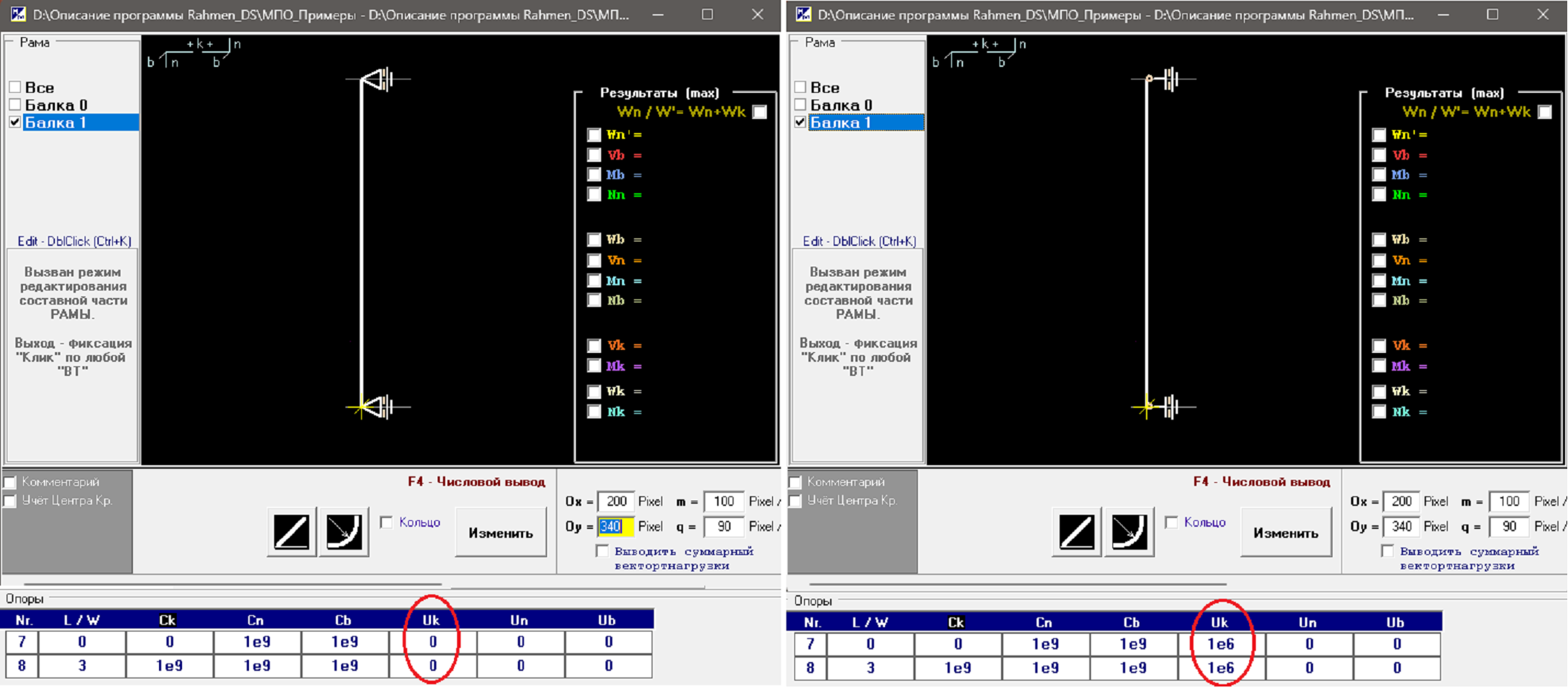
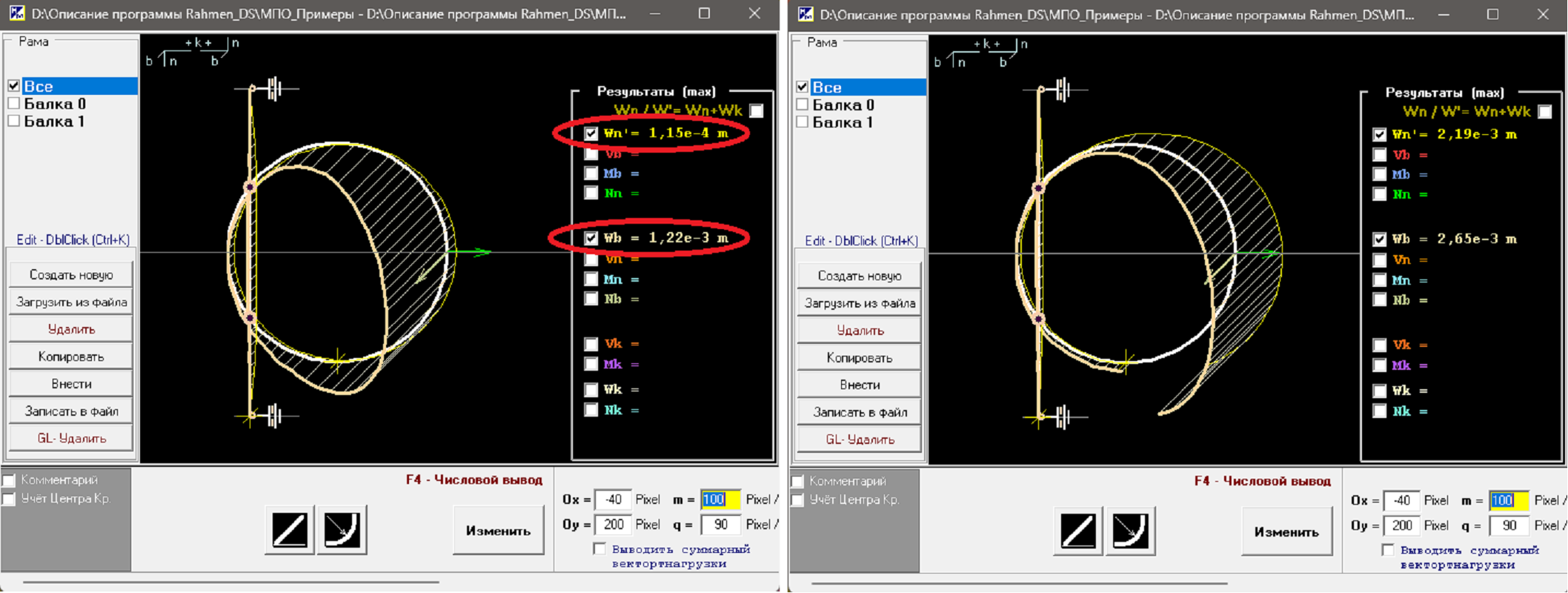
Вызовем на редактирование прямой стержень на двух простейших опорах (Балка 1) и обратим внимание на их крутильные жёсткости, они позволяют конструкции свободно вращаться относительно продольной оси стержня и, следовательно, решение выходящее из плоскости рисунка при частоте возбуждения w=0 некорректно. (В отличие от статики, вынужденные колебания, когда действуют силы инерции, будут рассчитаны правильно). Коррекция "Жесткостей" приводит к корректному решению исходной задачи.
Последний рисунок - решение задачи для случая, когда "Балка 0" не является замкнутым кольцом.
Created with the Personal Edition of HelpNDoc: Free Qt Help documentation generator